Introduction
Let me introduce Mono.
It is a small rover which I am going to build using simple set of existing modules.
As a base the ready chassis has been taken.
And here is the initial version for further experiments.

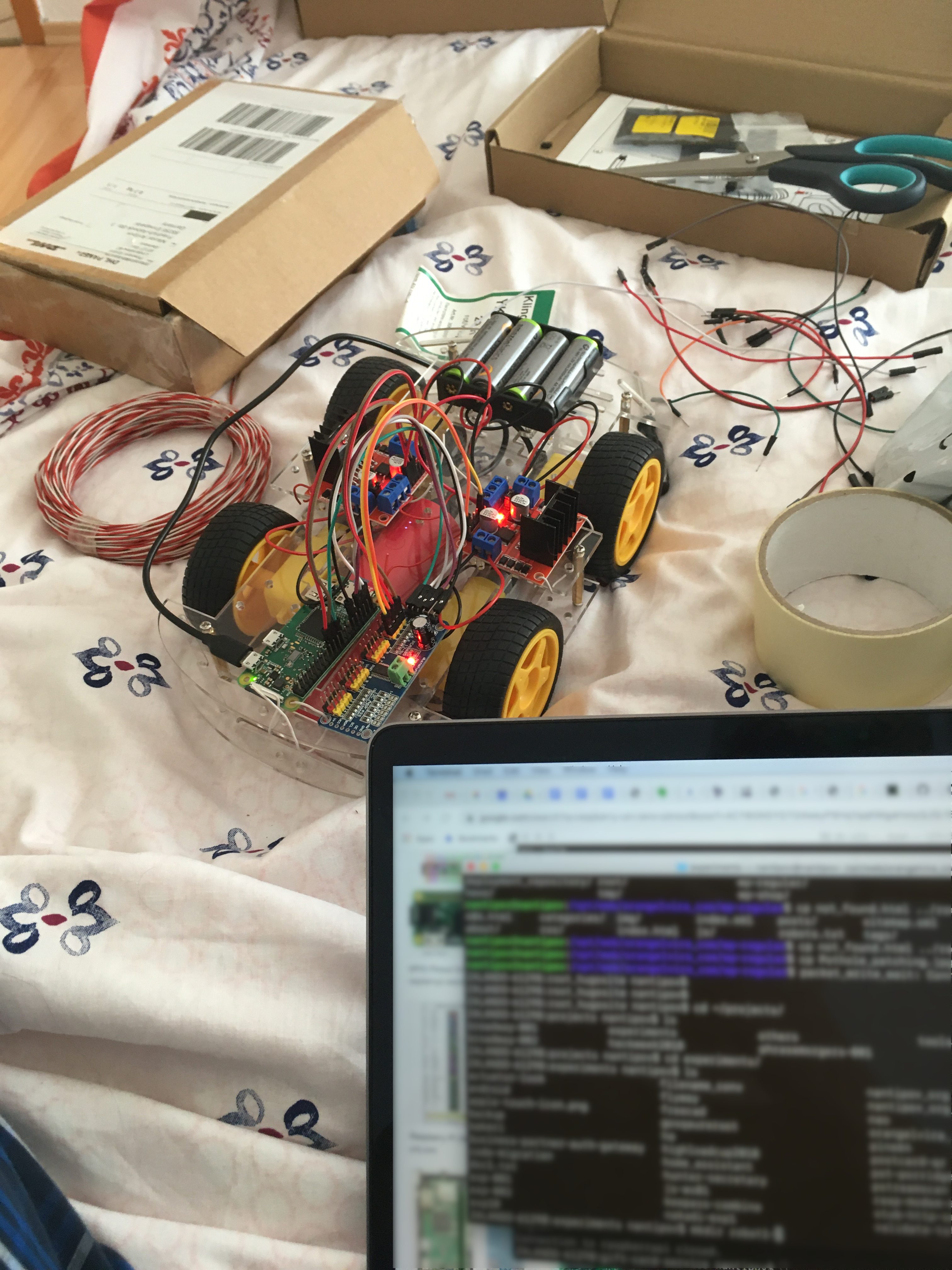
Components
Let’s start with the following things:
- Chassis with four motors;
- Motor drivers L298N (2x);
- Controller for generating PWM impulses PCA9685 (speed control);
- Brain as Raspberry PI Zero with WiFi;
- Batteries and power bank.
Yes, this is an experimental thing. Firstly, just try to make everything working in a simple way.
The current goal is ability to control four engines from the Raspberry PI.
For now, engines are powered by batteries (4 x 1.2 V = 4.8 V) and Raspberry PI is separately powered by the 5V power bank.
Things to improve
The biggest thing to improve is that currently nothing actually works :-). Or I would say that does not work as expected.
I have made a small piece of software for controlling the engines, but nothing works.
After short verification it seems we experience the voltage drop on engines up to 1.5 Volts. After reading a little bit
around this, it seems problem with L298N motor drivers. It recommended to supply it with at least 9 Volts.
Therefore, let’s aim for a small improvements:
- Power supply;
- Motor drivers with less “voltage consumption”.